
User-Centered Design of Assistance Drones using Digital Twins (Dronasis)
SBPLY/21/180501/000030
Introduction
Abstract
This research project integrates the use of digital twins in the design of assistive drones. The proposal starts from the use of a virtual simulated environment that facilitates the study of different modes of Human-Drone Interaction that will later be used for the design of certain behaviors of the physical drone. This approach tries to put the user at the center of the design of autonomous assistance devices, establishing a clear link between what has been learned in the virtual behavior of the device and its physical design, that is, between the virtual and the real world. The aim of this project is therefore to advance in two highly topical lines of research.
On the one hand, based on the ideas of user-centered design that seek to achieve a good user experience (UX), a platform will be created that allows analyzing Human-Drone Interaction in a realistic way, but with the security that it offers a simulated environment which allows not putting the user at risk and, in turn, through the analysis of physiological signals, it Will allow to know how the user feels about different behaviors of the drone, contributing that information to the physical design process of said assistance drone. On the one hand, based on the ideas of user-centred design that seek to achieve a good user experience (UX), a platform will be created that allows the analysis to the Human-Drone Interaction in a realistic manner, but with the security that it offers a simulated environment that avoids putting the user at risk and, in turn, through the analysis of physiological signals, it will allow to know how the user feels about different behaviors of the drone, contributing that information to the physical design process of said assistance drone. On the other hand, the behavior of the drone in the real world, this is its design characteristics, force to establish a series of restrictions in the simulated virtual environment so as not to create false expectations of unattainable behavior with current technology. In turn, these systems developed to manage the behavior of a real drone and created by considering the design recommendations obtained from the simulated environment, will be analysed and checked again in the simulated environment, in order to demonstrate their correct operation before moving on to the production process.
But to bring these new Drones assistants to homes, it is necessary to face different challenges, some more technical, others more human and social, and in this project several objectives are proposed on these two fronts in order to move towards a future that makes them feasible and practical. Within the scope of Human-Drone Interaction, we want to advance in the knowledge about the perception of potential users towards Drones (Unmanned Aerial Vehicles, UAVs), or the influence of the appearance and behavior of these machines in their acceptance; and the communication and interaction between assistant and assisted. For all this, the use of simulators is very relevant to understand how different scenarios can affect people even before they can become a reality. These simulated environments will be created using Virtual and Augmented Reality, thus facilitating an evaluation with high levels of realism, which will guarantee that the results obtained are quite close to the real system to be implemented in homes. Likewise, progress will be made in the design of systems that allow monitoring the user’s state of mind to know in real time how they feel about the actions of the drone. On the other hand, on the side of the assistant drone design, it is proposed to advance in the development of stabilization algorithms for the drone when it is subjected to disturbances of different nature (endogenous and exogenous), the navigation of the drone in closed environments with static and/or dynamic obstacles. On the other hand, as we saw previously, these movements designed for the drone must also be capable of transmitting certain attitudes or social behaviors that help their acceptance and understanding of the type of action they are performing within the context of Human-Drone Interaction.
Therefore, as a result of this project, a user-centered methodology and a tool will be created to facilitate the development of assistance drones, allowing to accelerate this process where the human factor is so relevant and, in many cases, so little considered. At the same time, progress will be made in solving some technical problems derived from the use of the drone in this type of space and associated with the performance of healthcare tasks. With this, the project will help to consolidate a sector with that of Drone companies that in our country is made up of approximately 2,500 companies, which mainly make use of these devices but, with a tool of this type, could give way to design and creating their own drones with custom behavior.
…
Main Challenges
Main Challenges
…
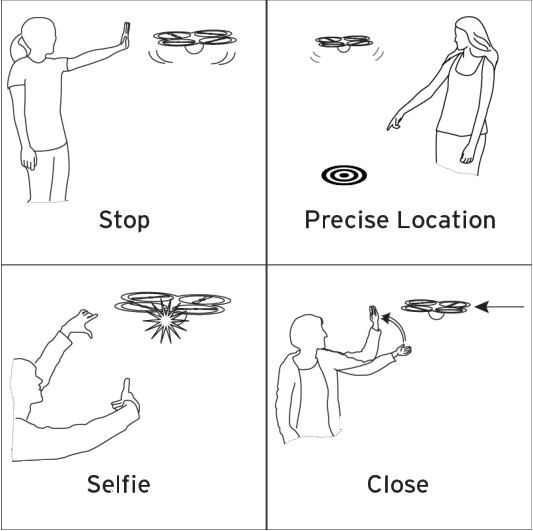
Advance in the knowledge of Human-Drone Interaction
..
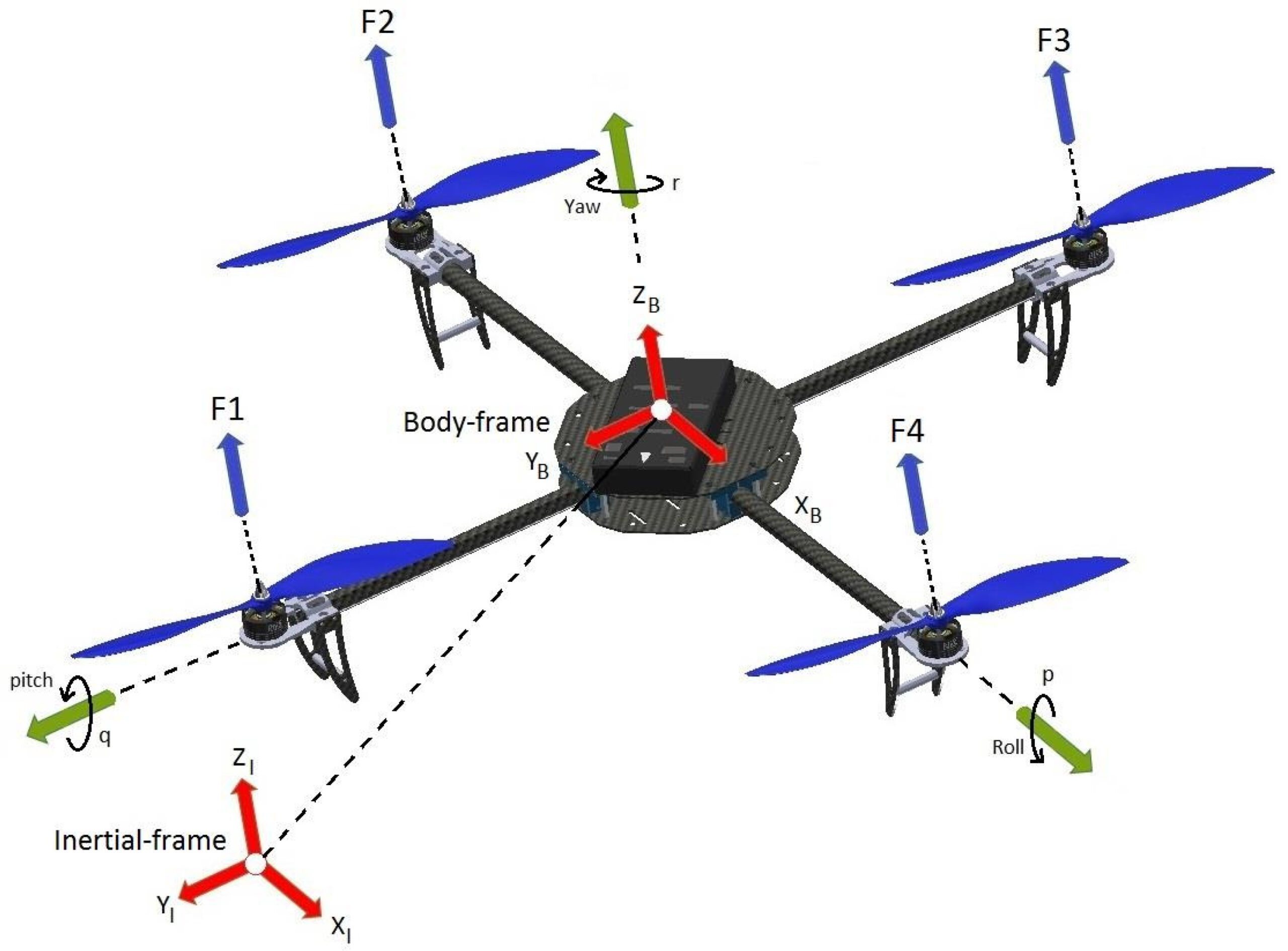
Advance in the stabilization, maneuverability and navigation of the Drone.
…
Starting Hypothesis
The starting hypothesis of this project is that the development of assistive drones will improve if, within their design, it is included artifacts that allow to know a priori the acceptance by the users of the appearance, behaviors and Human-Drone interaction. Therefore, the main objective of the project is to create a development framework, based on the advantage of the use of digital twins, which allows to analyze the acceptance of assistive drones by potential users and design the behavior of the drone based on what is learned from the simulated environments.
Specific Objectives
Specific Objectives
OBJ1.1. To develop an Extended Reality simulator that serves as a digital twin to analyze behaviors of both DronAvatar and DronCCD.
OBJ1.4. Use eye-tracking techniques to know which elements of the interaction are the ones that really affect the detected emotions
OBJ1.2. Create a user-centered drone design methodology to integrate different ways of studying and evaluating user attitudes towards the behavior of assistive drones.
OBJ1.5. Advance in the design of acceptable behaviors by potential users.
OBJ1.3. Advance the use of physiological signals to understand the user’s state of mind regarding perceived behaviors and actions.
OBJ2.1. Develop a state of the art of Drone flight safety.
OBJ2.4. Development of high gain noise removal algorithms in high gain observers and implementation of ADRC algorithms in small power and limited memory processors.
OBJ2.2. Obtaining the kinematic and dynamic model of the Drone (DronCCD).
OBJ2.5. Development of the Dron navigation system (DronCCD).
OBJ2.3. Development of continuous time control algorithms to improve the stabilization and maneuverability of the Dron (DronCCD).
Research Team
Engineers in Computer Science, Industrial Engineering and Telecommunications from Universidad de Castilla-La Mancha (UCLM):

Pascual González López
Full Professor. Principal Researcher

Pascual González López
Full Professor

Rafael Morales Herrera
Associate Professor, Co-Principal Researcher

Víctor López Jaquero
Associate Professor

Antonio Fernández-Caballero
Full Professor

María Teresa López Bonal
Associate Professor

José Pascual Molina Massó
Associate Professor

Arturo Simón García Jiménez
Assistant Professor

Lidia María Belmonte Moreno
Assistant Professor

Yuxa Elvira Maya López
Assistant Professor

Agustín Gómez Toston Salazar
Assistant Professor

Javier Jiménez Ruescas
Assistant Professor
Participating Institutions

Complejo Hospitalario Universitario de Albacete
Researchers
Results
Results
PhD Thesis
Masters Thesis
2023
Gómez-Toston-Salazar A., (2023) Creación y validación de un cuestionario para medir la actitud hacia el uso y presencia de drones asistenciales en el adulto mayor. Máster universitario en investigación en psicología aplicada (MUIPA). Universidad de Castilla La-Mancha
Journal Papers
2022
Bustamante, A., Belmonte, L. M., Morales, R., Pereira, A., & Fernández-Caballero, A. (2022). Video processing from a virtual unmanned aerial vehicle: Comparing two approaches to using OpenCV in unity. Applied Sciences, 12(12), 5958.
2024
Pretel, E., Moya, A., Navarro, E., López-Jaquero, V., & González, P. (2024). Analysing the synergies between Multi-agent Systems and Digital Twins: A systematic literature review. Information and Software Technology, 107503.
Conference Papers
2023
Jiménez-Ruescas, J., Sánchez, R., Maya, Y., Fernández-Caballero, A., García, A. S., & González, P. (2023, November). A Framework for Managing the Experimental Evaluation of Ambient Assisted Living Systems. In International Conference on Ubiquitous Computing and Ambient Intelligence (pp. 124-135). Cham: Springer Nature Switzerland.
Montero, F. López-Jaquero, V. (2023) Una propuesta de evaluación de la interacción considerando valores y actitudes. XXIII Congreso Internacional de Interacción Persona-Ordenador (INTERACCIÓN’23), 4 al 6 de septiembre de 2023, Lleida, Spain
Books and Books Chapters
Grant SBPLY/21/180501/000030:
From: 2022 until: 2025.