Conflict management between UAVs is one of the key aspects in developing future urban aerial mobility (UAM) spaces, such as the one proposed in U-Space. In the short future, civil aerospace will be occupied by centenar or thousands of UASs for different purposes: transport, package delivery, emergency management, etc. With multiple aerial vehicles, conflicts between them (lack of a minimum of distance) could occur getting a crash and several potential security violations.
Our research pretends to avoid in-air conflicts between UAS monitoring its positions and computing their future positions with its vector velocity and planned velocity. Moreover, if a conflict may occur, a new velocity vector is computed in other to avoid this conflict and avoid the generation of other conflicts. Of course, following U-space Concept of Operations specification.
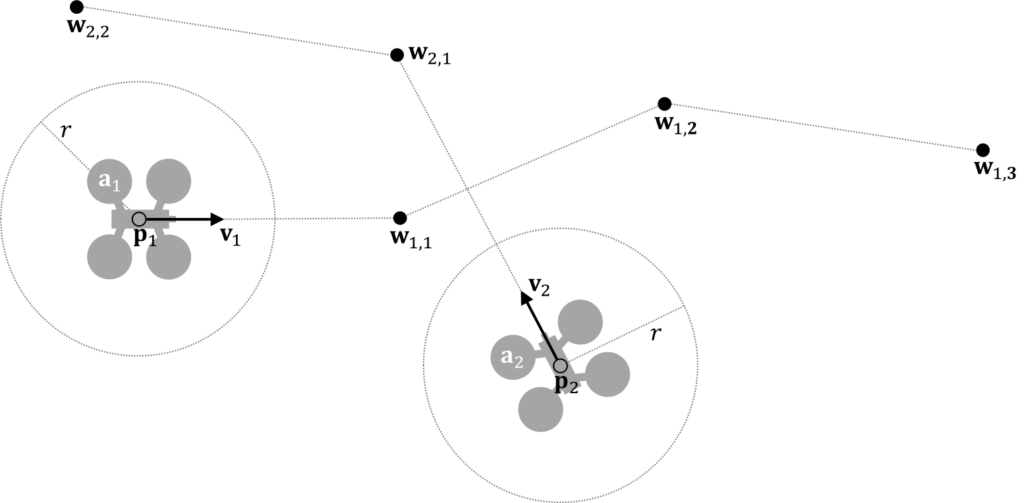
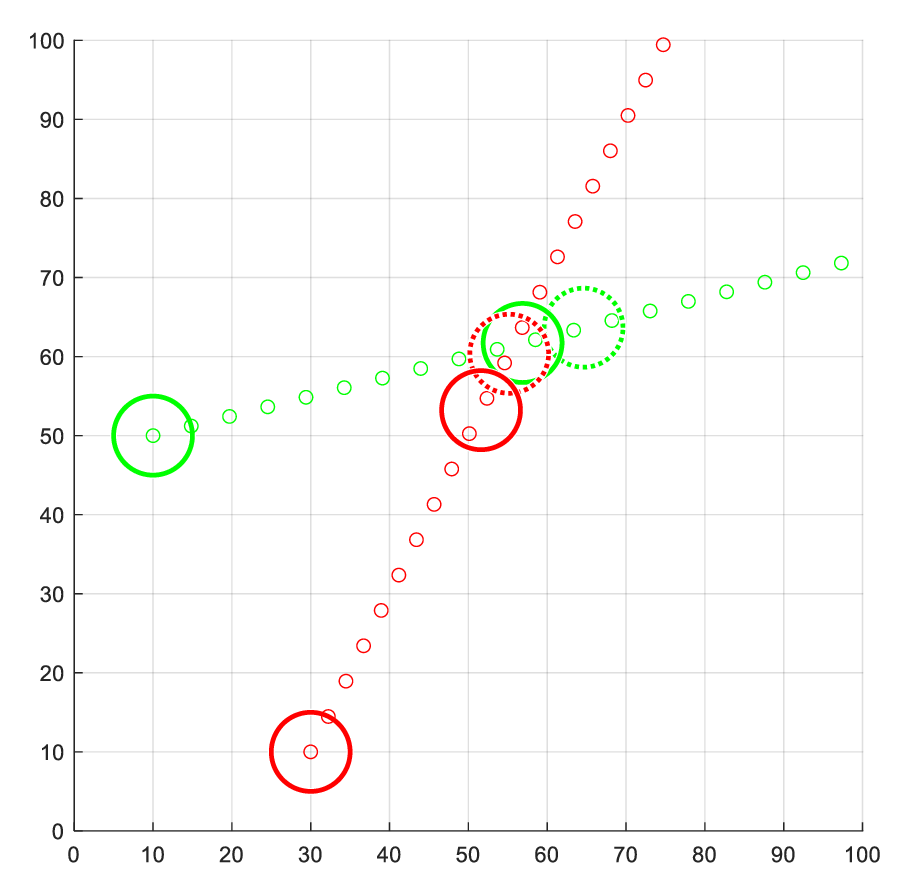
The new velocity vectors generated must avoid all conflicts as well as deviate as minimum as possible the planned route in other to minimize the overhead (distance and time in the air, battery consumption, etc). To generate the velocity vector two main strategies are used: velocity modifications and trajectory modifications. Moreover, in the most difficult conflicts, i.e. when the UAS are so close, the method could stop the displacement of the vehicles (“hovering”). We call this method “Prediction-based Conflict-free Adaptive Navigation (PCAN)”.
This method has been simulated and tested using Matlab, and the results are:
- In total, 960 airspaces were simulated, with different airspace sizes, numbers of UAS and configurations.
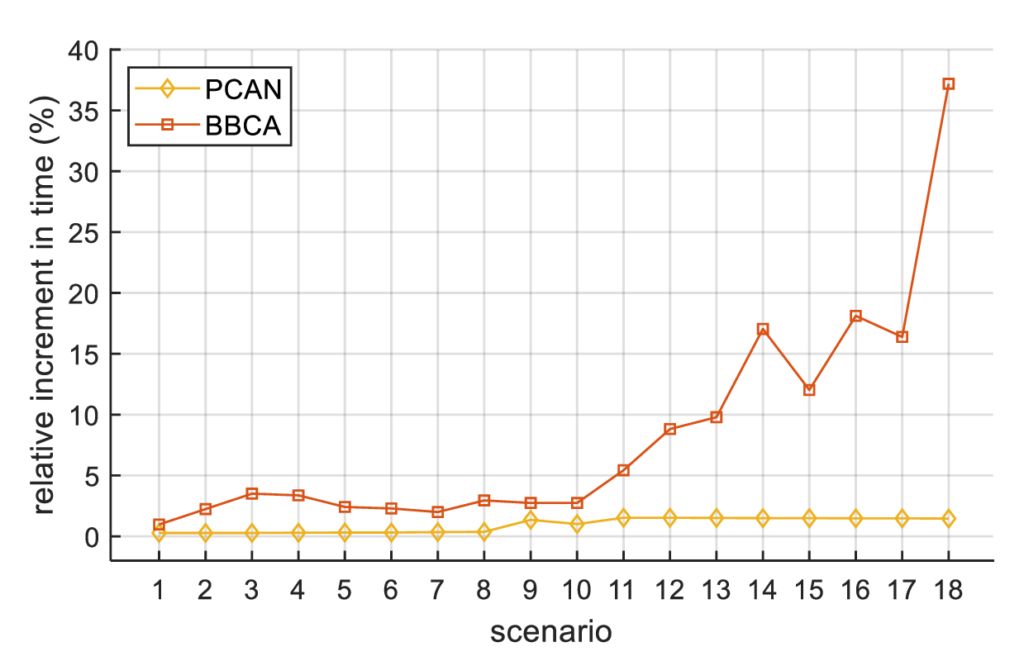
- The overhead in distance and time produced by PCAN compared with the direct algorithm (thus algorithm that offers the shorter route between UAS and its destination at the maximum velocity allowed) is:
- Up to 4% of increment in the distance travelled in the densest airspaces tested.
- Up to 6% of increment in the time needed to travel in the densest airspaces tested.
This result offers up to a 40% of improvement in the overhead compared with other alternatives, as Boundary Box Conflict Avoidance (BBCA) proposed previously, meanwhile all conflicts are resolved.
As current and future work, we are improving the method to introduce a dynamic prediction model, navigation based on priorities, geo-fences and the reduction of the algorithm complexity. Parallel, we are developing an all-new simulator that allows us to test new methods in a more sophisticated and realistic way. Moreover, the new simulator will be designed to work in HPC, with the objective to use I3A Galgo supercomputer to simulate big bulk scenarios and validate the methods.
Topics:
- Urban Air Mobility (UAM)
- Unmanned Aircraft Systems (UAS)
- UAS Traffic Management (UTM)
- Conflict detection and Resolution (CD&R)
- Tactical Conflict Management
- Autonomous Navigation Systems
Relevant Publications:
- Aurelio Bermúdez, Rafael Casado, Guillermo Fernández, María Guijarro, Pablo Olivas.
Drone challenge: A platform for promoting programming and robotics skills in K-12 education
International Journal of Advanced Robotic Systems 16(1):172988141882042; http://dx.doi.org/10.1177/1729881418820425 - Aurelio Bermúdez, Rafael Casado, Paloma Sánchez.
Real-Time Collision-Free Navigation of Multiple UAVs Based on Bounding Boxes
MDPI Electronics 2020, 9(10), 1632; https://doi.org/10.3390/electronics9101632 -
Aurelio Bermudez, Rafael Casado.
A simulation framework for developing autonomous drone navigation systems
MDPI Electronics 2021, 10(1), 7; https://doi.org/10.3390/electronics10010007 - Aurelio Bermúdez, Rafael Casado, Jesús Jover.
Una propuesta de resolución táctica de conflictos en entornos U-Space Zu.
“Avances en arquitectura y tecnología de computadores. Actas de las Jornadas SARTECO 20/21”; ISBN: 978-84-09-32487-3. - Aurelio Bermúdez, Rafael Casado, Jesús Jover
A tactical conflict resolution proposal for U‐Space Zu airspace volumes
MDPI Sensors 2021, 21(16), 5649;https://doi.org/10.3390/s21165649
People:
 |
Rafael Casado, PhD Associate Professor Phone number: +34 967 599200 – Ext. 2279 Email: rafael.casado@uclm.es |
 |
Aurelio Bermúdez, PhD Associate Professor Phone number: +34 967 599 200 – Ext. 2551 Email: aurelio.bermudez@uclm.es |
 |
Jesús Jover Student and I+D Email: jesus.jover@uclm.es |